动态规划中递推式的求解方法不是动态规划的本质。 动态规划的本质,是对问题状态的定义和状态转移方程的定义。 动态规划是通过拆分问题,定义问题状态和状态之间的关系,使得问题能够以递推(或者说分治)的方式去解决。 本题下的其他答案,大多都是在说递推的求解方法,但如何拆分问题,才是动态规划的核心。 而拆分问题,靠的就是状态的定义和状态转移方程的定义。 要解决这个问题,我们首先要定义这个问题和这个问题的子问题。 有人可能会问了,题目都已经在这了,我们还需定义这个问题吗?需要,原因就是问题在字面上看,不容易找不出子问题,而没有子问题,这个题目就没办法解决 。状态转移方程,就是定义了问题和子问题之间的关系。 可以看出,状态转移方程就是带有条件的递推式。
一.阶乘(Factorial)
$1\times 2\times3\times\dots\times N$,整数1到$N$的连乘积。$N$阶乘$N!$
分析:$N!$源自$(N-1)!$,如此就递回分割问题了。

阵列的每一格对应每一个问题。设定第一格的答案,再以回圈依序计算其余答案。

1 | const int N = 10; |
1 | const int N = 10; |
时间复杂度
总共$N$个问题,每个问题花费$O(1)$时间,总共花费$O(N)$时间
空间复杂度
求$1!$到$N!$:总共$N$个问题,用一条$N$格阵列存储全部问题的答案,空间复杂度为$O(N)$
只求$N!$:用一个变量累计成绩,空间复杂度为$O(1)$
Dynamic Programming: recurrence
Dynamic Programming = Divide and Conquer + Memoization
动态规划是分治法的延伸。当递推分割出来的问题,一而再、再而三出现,就运用记忆法储存这些问题的答案,避免重复求解,以空间换取时间。动态规划的过程,就是反复地读取数据、计算数据、储存数据。
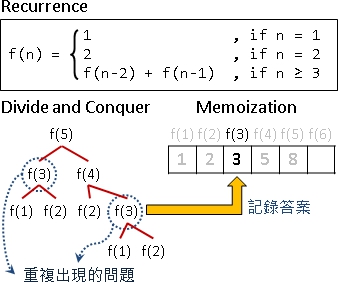
把原问题递归分割成许多更小的问题。(recurrence)
子问题与原问题的求解方式皆类似。(optimal sub-structure)
子问题会一而再、再而三的出现。(overlapping sub-problems)
设计计算过程:
确认每个问题需要哪些子问题来计算答案。(recurrence)
确认总共有哪些问题。(state space)
把问题一一对应到表格。(lookup table)
决定问题的计算顺序。(computational sequence)
确认初始值、计算范围(initial states / boundary)
实作,主要有两种方式:
Top-down
Bottom-up
1. recurrence
递归分割问题时,当子问题与原问题完全相同,只有数值范围不同,我们称此现象为recurrence,再度出现、一而再出现之意。
【注: recursion 和 recurrence ,中文都翻译为“递归”,然而两者意义大不相同,读者切莫混淆】
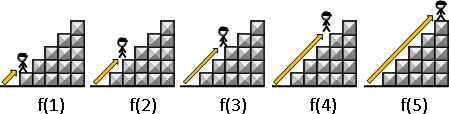
此处以爬楼梯问题当做范例。先前于递归法章节,已经谈过如何求踏法,而此处要谈如何求踏法数目。
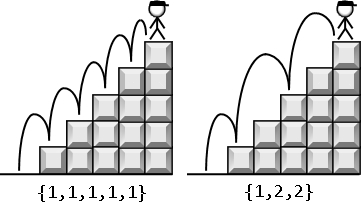
踏上第五阶,只能从第四阶或从第三阶踏过去,因此爬到五阶源自两个子问题:爬到四阶与爬到三阶。
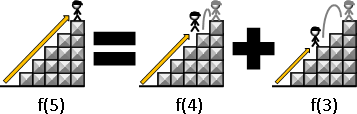
爬到五阶的踏法数目,就是综合爬到四阶与爬到三阶的踏法数目。写成数学式子是$f(5)=f(4)+f(3)$,其中$f$表示爬到某阶的踏法数目。
依样画葫芦,得到
$$
f(4)=f(3)+f(2)\\
f(3)=f(2)+f(1)
$$
爬到两阶与爬到一阶无法再分割,没有子问题,直接得到
$$
f(2)=2\\
f(1)=1
$$
整理成一道简明扼要的递归公式:
$$
f(n)= \begin{cases}
1&if n=1 \\
2 & if n =2 \\
f(n-1)+f(n-2) & if n \ge3 and n\le 5
\end{cases}
$$
爬到任何一阶的踏法数目,都可以借由这道递归公式求得。 带入实际数值,递归计算即可。
带入实际数值,递归计算即可。
为什么分割问题之后,就容易计算答案呢?因为分割问题时,同时也分类了这个问题所有可能答案。分类使得答案的规律变得单纯,于是更容易求得答案。
2 、state space
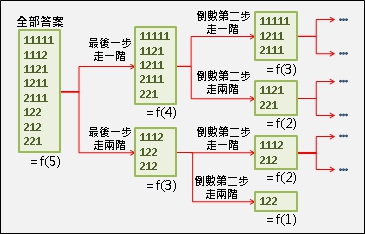
想要计算第五阶的踏法数目。
全部的问题是“爬到一节”、“爬到二阶”、“爬到三阶”、“爬到四阶”、“爬到五阶”。
至于爬到零阶、爬到负一阶。爬到负二阶以及爬到六阶、爬到七阶没有必要计算。
3、lookup table
建立六格的阵列,存储五个问题的答案。
表格的第零格不使用,第一格式爬到一阶的答案,第二格是爬到二阶的答案,以此类推。
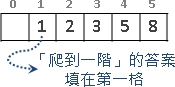
如果只计算爬完五阶,也可以建立三个变量交替使用。
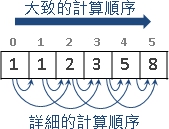
4、computational sequence
因为每个问题都依赖阶数少一阶、阶数少两阶这两个问题,所以必须由阶数小的问题开始计算。
计算顺序是爬到一阶、爬到二阶、……、爬到五阶。设定初始值。
5、 initial states / boundary
最先计算的问题时爬到一阶与爬到二阶,必须预先将答案填入表格。写入方程式,才能计算其他问题。心算求得爬到一阶的答案是1,爬到二阶的答案是2。最后计算的问题时原问题是原问题爬到五阶。
为了让表格更顺畅。为了让程式更漂亮,可以加入爬到零阶的答案,对应到表格的第零格。爬到零阶的答案,可以运用爬到一阶的答案与爬到两阶的答案,刻意逆推而得。
最后可以把初始值,尚待计算的部分、不需计算的部分,整理成一道递归公式:
$$
f(n)= \begin{cases}
0 & if n<0\\ 0="" 1="" &="" if="" \="" n="0\\" 1&if="" \\="" f(n-1)+f(n-2)="" \ge2="" and="" n\le="" 5\\="">5
\end{cases}
$$
6、实现
直接用递归实作,而不使用记忆体存储各个问题的答案,是最直接的方式,也是最慢的方式。时间复杂度是$O(f(n))$。问题一而再、再而三的出现,不断呼叫同样的函数求解,效率不彰。刚接触DP的新手常犯这种错误。
1 | int f(int n) |
正确的DP是一边计算,一边将计算出来的数值存入表格,以便不必重算。这里整理了两种实现方式,各有优缺点。
1)Top-down
2)Bottom-up
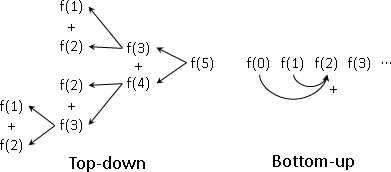
1)Top-down
1 | int table[6]; // 表格,储存全部问题的答案。 |
1 | int table[6]; // 合并solve跟table,简化代码。 |
这个实现方式的好处是不必斤斤计较计算顺序,因为代码中的递归结构会迫使最小的问题先被计算。这个实现方式的另一个好处是只计算必要的问题,而不必计算所有可能的问题。
这个实现的坏处是代码采用递归结构,不断调用函数,执行效率差。这个实现方式的另一个坏处是无法自由地控制计算顺序,因而无法妥善运用记忆体,浪费了可回收再利用的记忆体。
2)Bottom-up
指定一个计算顺序,然后由最小问题开始计算。特色是代码通常只有几个递归。这个实现方式的好处与坏处与前一个方式恰好互补。
首先建立表格。
1 | int table[6]; |
心算爬到零阶的答案、爬到一阶的答案,填入报个当中,作为初始值。分别天道表格的第零格、第一格。
1 | table[0] = 1; |
尚待计算的部分就是爬到两阶的答案、……、爬到五阶的答案。通常是使用递归,按照计算顺序来计算。
计算过程的实现方式,有两种迥异的风格。一种是往回取值,是常见的实现方式。
1 | 往回取值 |
另一种是往后补值,是罕见的实现方式。
1 | 往后补值int table[6]; |
7、总结
第一,先找到原问题和其子问题之间的关系,写成递归公式。如此一来,即可利用递归公式,用子子问题的答案,求出子问题的答案;用子问题的答案,求出原问题的答案。
第二。确认可能出现的问题全部总共有哪些;用子问题的答案,求出原问题的答案。
第三。有了递归公式之后,就必须安排出一套计算顺序。大问题的答案,总是以小问题的答案来求得的,所以,小问题的答案必须是先算的,否则大问题的答案从何而来呢?一个好的安排方式,不但使代码易写,还可重复利用记忆体空间。
第四。记得先将最小,最先被计算的问题,心算出答案,储存如表格,内建与代码之中。一道递归公式必须拥有初始值,才有计算其他项。
第五。实现DP的代码时,会建立一个表格,表格存入所有大小问题的答案。安排好每个问题的答案再表格的哪个位置,这样计算时才能知道该在哪里取值。
切勿存取超出表格的原始,产生溢位情形,导致答案算错。计算过程当中,一旦某个问题的答案出错,就会如骨牌效应般一个影响一个,造成很难除错。